Robotics 1
Analog Sensors
Quiz
Analog Sensors
Quiz




Question 11: If your sensor has nonlinearity error, which of the following is also true?
Question 12: Which of the following is NOT true of sensor sensitivity?
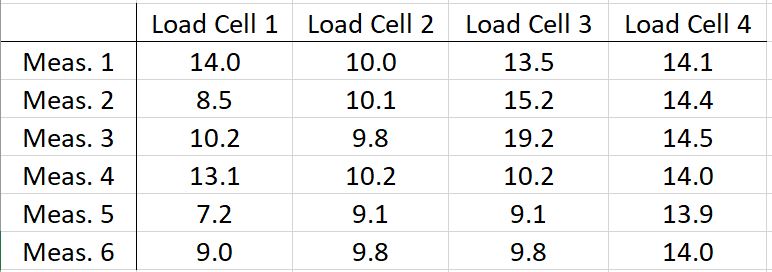
Suppose that you are testing 4 different load cells, and you apply a force of 10 Newtons to each load cell, and use the sensor response curve to read the force output. You repeat the test 5 times, obtaining the data shown below. Questions 13-15 refer to this test data.
Question 13: Which load cell is very precise, but not very accurate?
Question 13: Which load cell is very precise, but not very accurate?
Question 15: Which load cell is both accurate and precise?
The sensor has a variable sensitivity
The sensor sensitivity is a constant
The sensor is not very accurate
The sensor is not very precise
Sensor sensitivity is the slope on a sensor response curve
Sensor sensitivity is the amount that the output changes for a given change in the input
Sensor sensitivity is greater for more precise sensors
Sensor sensitivity can either be constant or variable
Load Cell 1
Load Cell 2
Load Cell 3
Load Cell 4
Question 14: Which load cell is very accurate but not very precise?
Load Cell 1
Load Cell 2
Load Cell 3
Load Cell 4
Load Cell 1
Load Cell 2
Load Cell 3
Load Cell 4